1. Robot
Robot biorący udział w tej konkurencji musi zmieścić się w sześcianie o długości boku 30 cm. Po rozpoczęciu zadania wymiary robota nie mogą ulec zmianie. Maksymalna dopuszczalna masa robota: 2 kg.
Program robota musi być uruchamiany 1 przyciskiem. Robot musi być autonomiczny.
Robot może składać się wyłącznie z nieelektronicznych części LEGO oraz z następujących części elektronicznych:
- 1 x kostka EV3, NXT MINDTORMS lub RCX,
- 1-4 interaktywnych serwomotorów LEGO,
- 0-4 czujników z poniższej listy:
- czujnik światła LEGO,
- czujnik koloru LEGO,
- czujnik koloru HT (w wersji 1.0 lub 2.0),
- czujnik odległości ultradźwiękowy LEGO,
- czujnik żyroskopowy LEGO ,
- czujnik dotyku LEGO,
- czujnik podczerwieni LEGO.
Żadne inne części elektroniczne (inne czujniki, rozdzielacze itd.) nie są dozwolone. Umieszczone na robocie akumulatory / baterie muszą służyć do jego zasilania, silniki i czujniki muszą być podłączone odpowiednim kablem do kostki.
Robot powinien posiadać hak umożliwiający przyczepienie liny, umieszczony trwale do robota, w miejscu pokazanym na rysunku.
- wys. h: min. 3,5 cm / max. 8 cm od podłoża
- Hak powinien wystawać na odległość a: min. 3,5 cm / max 5 cm z przodu robota (mierzone od kolejnej najbardziej wystającej części robota z tej strony).

Instrukcja budowy haka z uchwytem do liny: hak_do_liny
Do robota na stałe muszą być przyczepione białe części, pozostałe będziemy przypinać razem z linką przed każdym przejazdem.
2. Plansza i lina
Plansza ma wymiary 2m na 1m. Na środku znajduje się linia dzieląca planszę na dwa pola o wymiarach 1m x 1m.
Lina ma długość 30 cm + części do montażu na hakach, na środku liny znajduje się znacznik.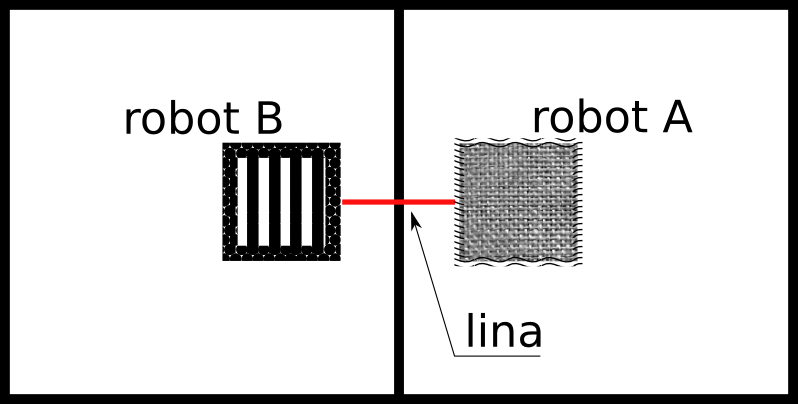
Grubość liny nie ma znaczenia, jej średnica nie będzie większa niż 5mm, organizator dobiera rodzaj i materiał z którego lina jest zrobiona.
Poglądowe zdjęcie pokazujące linę zamocowaną do haka:

Wszystkie podane w tekście wymiary planszy i linki podane są z dokładnością +/- 5 cm chyba, że zaznaczono inaczej.
3. Zasady i punktacja
Dwa – połączone liną – roboty ustawiamy na przeciwko siebie, tak, żeby środek liny znajdował się nad linią dzielącą planszę na połowy.
Na dany przez sędziego sygnał roboty zaczynają się przeciągać, punkt przyznaje się drużynie, której robot przeciągnie całego (patrząc od góry) robota przeciwnika na swoją połowę.
Zawody będą odbywać się systemem pucharowym, każdy mecz po trzy ciągi. Drużyna wygrywająca mecz „do zera” otrzyma 3 punkty, drużyna wygrywająca mecz dwoma przeciągnięciami do jednego otrzymuje 2 punkty, zaś drużyna przegrywająca w tym przypadku – 1 punkt.
W przypadku, gdyby kilka drużyn miało tyle samo punktów, rozegrane zostaną między nimi dogrywki.
Równocześnie będą odbywać się przejazdy na przynajmniej trzech planszach.
4. Podważanie decyzji sędziego
Wszystkie sytuacje nie objęte tym regulaminem będą rozpatrywane podczas spotkania przez sędziego głównego, którego zdanie jest ostateczne.